
Графоаналитический способ определения перемещения при изгибе. Способ Верещагина
8 страниц (Word-файл)
Посмотреть все страницы


15. Потенциальная энергия деформации при изгибе.
При изгибе, также как и при других видах деформации, работа, производимая внешними силами, затрачивается на изменение потенциальной энергии деформированного стержня.
Работа внешнего момента при упругой деформации стержня:
Где - угол поворота сечения в точке приложения момента.

Элементарная работа изгибающего (внутреннего) момента определяется из выражения (по аналогии со случаем растяжения-сжатия):
![]() , но при изгибе
имеем: .
, но при изгибе
имеем: .
Кривизна, как величина, обратная радиусу кривизны определяется из выражения:
![]() , где: - модуль упругости первого рода;
, где: - модуль упругости первого рода;
Момент инерции сечения относительно нейтральной оси сечения.
Поэтому можно записать:
![]() .
.
Полная работа изгибающих моментов для балки длинной l :
 .
.
Потенциальная энергия изгиба, равная работе внутренних сил, взятая с обратным знаком, определяется из выражения:
 .
.
Добавок потенциальной энергия за счет сдвига (для общего случая не прямого, а поперечного изгиба), соответствует работе поперечной силы. Но этот добавок по абсолютному значению невелик и при практических расчетах им обычно пренебрегают.
16. Теорема о взаимности работ и взаимности перемещений.
Рассмотрим упругую линейно деформируемую систему в двух различных состояниях, отвечающих двум различным нагрузкам P1 и P2 (рисунок 47). В данном случае простая балка нагружена в обоих состояниях простой нагрузкой (по одной сосредоточенной силе P1 и P2 ).

Рисунок 47
а) первое состояние системы (под нагрузкой Р1 );
б) второе состояние системы (под нагрузкой Р2 ).
Δ 11 – перемещение по направлению нагрузки Р1 Р1 .
Δ 21 – перемещение по направлению нагрузки Р2 в месте ее приложения от действия Р1 .
Δ 22 – перемещение по направлению нагрузки Р2 в месте ее приложения от действия Р2 .
– перемещение по направлению нагрузки Р1 в месте ее приложения от действия Р2 .
Перемещения Δ 11 к Δ 22 называются главными, а перемещения Δ 12 к Δ 21 – побочными.
Теорема: Работа внешних сил первого состояния, на перемещениях, вызванных силами второго состояния, равна работе внешних сил второго состояния на перемещениях, вызванных силами первого состояния.
Доказательство.
1) Вначале приложим силу Р1, а затем к деформированной балке приложим силу Р2 .
Подсчитаем работу, произведенную внешними силами (обращая внимание на рисунок 48).
Работа произведенная статически приложенной силой Р1 на собственном перемещении Δ 11 , вызванном этой силой, определится из выражения:
Работа, произведенная статически приложенной силой Р2 на собственном перемещении Δ 22 определится из подобного выражения:
 |
Рисунок 48
При этом дополнительная работа уже постоянно приложенной силы Р1 на перемещении Δ 12 , вызванном силой Р2 определится из выражения:
(обращая внимание на то, что множитель 1/2 в выражении отсутствует, поскольку сила Р1 постоянна на перемещении Δ 12).
Полная работа внешних сил при рассмотренной последовательности приложении нагрузок:
![]() .
.
2) Теперь вначале приложим силу Р2 , а затем к деформированной системе приложим силу Р1 .
Рассуждаем аналогично первому случаю. Работа произведенная силой Р2 на собственном перемещении Δ 22 , вызванном этой силой:
Работа, произведенная силой P 1 на собственном перемещении Δ 11:
Дополнительная работа силы P 2 на перемещении Δ 21 , вызванном силой P 1 :
(множитель 1/2 отсутствует, поскольку сила P 2 постоянна на перемещении Δ 21).
Тогда полная работа внешних сил при рассмотренной последовательности приложения нагрузок:
![]() .
.
Поскольку работа сил не зависит от порядка их приложения, следовательно:
или иначе:
А для рассматриваемого случая;
![]() .
.
Полагая приложенные силы единичными P 1 = P 2 =1 , получим равенство перемещений, вызванных единичными силами:
Последнее равенство доказывает теорему о взаимности перемещений:
Перемещение точки приложения единичной силы по ее направлению, вызванное второй единичной силой, равно перемещению точки приложения второй единичной силы по направлению последней, вызванному действием первой единичной силы.
Аналогично можно доказать взаимность дополнительной работы внутренних сил:
Для этого рассмотрим элемент балки длиной dz (рисунок 49).
Рассмотрим два различных состояния (в порядке загружения) одной и той же упругой системы:состояния 1 при действии группы сил и состояние 2 при действий группы сил на примере балки на рис.33, а
. Определим и сопоставим работу внешних сил в следующих предположениях. Сначала система постепенно загружается силами состояния 1, а затем, когда силы достигнут окончательного значения, система будет постепенно нагружаться силами состояния 2.Во втором варианте последовательность приложения сил изменяется. Сначала система нагружается силами состояния 2, а затем -силами состояния 1.Допустим, что сперва на систему начала постепенно действовать нагрузка первого состояния, а потом- второго. Суммарная работа внешних сил будет выражаться алгебраической суммой ![]() .
.
Рассмотрим теперь приложение нагрузки в обратной последовательности, когда сначала прикладывается нагрузка второго, а затем – первого состояния. В этом случае суммарная работа внешних сил выразится следующей алгебраической суммой: ![]() , где -работа внешних сил второго состояния на перемещениях, вызванных действием сил первого состояния.
, где -работа внешних сил второго состояния на перемещениях, вызванных действием сил первого состояния.
Согласно выражению (63), суммарная работа W внешних сил равна по абсолютной величине работе А внутренних сил, взятой с обратным знаком, или потенциальной энергии деформации U .
Известно, что в линейно деформируемой системе потенциальная энергия деформации не зависит от последовательности приложения внешних сил, а зависит только от исходного и конечного состояний системы. Поскольку исходное и конечное состояния системы в обоих случаях загружения одинаковы, то и суммарные работы внешних сил будут равны, т.е. или , откуда
Полученная аналитическая зависимость выражает собой теорему о взаимности работы и формируется так: в линейно деформируемом теле возможная работа внешних или внутренних сил первого состояния на перемещениях точек их приложения, вызванных действием сил второго состояния, равна возможной работе внешних или внутренних сил второго состояния перемещениях, вызванных действием сил первого состояния. Это так называемая теорема Бетти-Рэлея.
Теорема о взаимности перемещений может быть представлена как частный случай теоремы о взаимности работ. Пусть на балку в первом состоянии действует только одна единичная сила , а во втором состоянии – тоже одна единичная сила (рис.34,а, б ). Сила приложена в точке 1, а сила – в точке 2. На основании теоремы о взаимности работ приравняем возможную работу внешних сил первого состояния на перемещениях второго состояния работе сил второго состояния на перемещениях первого состояния:
Это аналитическое выражение для теоремы взаимности перемещений, которая формулируется так: перемещение точки приложения первой единичной силы по направлению, вызванное действием второй единичной силы, равно перемещению по направлению второй единичной силы, вызванному действием первой единичной силы, это так называемая теорема Максвелла, имеющая фундаментальное значение в строительной механике.

Рисунок 34 – Определение взаимности перемещений
Литература:
Основная: 6[разр.3: с 29-31; разр.5:с 36-47].
Контрольные вопросы:
1 Для чего нужно уменьшит размеры панелей и с какой целью вводятся дополнительные двухопорные фермочки-шпренгели, а также сколько и какие категории различают в шпренгельных фермах, и как определяются усилия в элементах основной и дополнительных ферм?
2 Какими функциями выражаются деформации (перемещения)в упругих системах и как аналитически это может быть записано, а также при каких допущениях, назовите их, перемещения, и деформации рассматриваемых упругих систем подчиняются закону независимости действия сил?
3 Для чего анализируют работу внешних и внутренних сил упругого тела и какими понятиями при этом пользуются в строительной механике, а также по какой зависимости определяется работа деформации элементов сооружения при статическом приложении внешних сил, дайте определение теореме Клайперона?
4 По какой зависимости определяется работа всех внешних сил действующих на балку и через какие силы может быть выражена работа внутренних сил упругой стержневой системы?
5 По какой зависимости определяется полная работа внутренних сил и почему работа внешних и внутренних сил называется возможной?
6 Какая аналитическая зависимость выражает теорему о взаимности работы и как формулируется (теорема Бетти-Релея)?
Рассмотрим два состояния упругой системы, находящейся в равновесии. В каждом из этих состояний на систему действует некоторая статическая нагрузка (рис.4,а). Обозначим перемещения по направлениям сил F1 и F2 через, где индекс «i» показывает направление перемещения, а индекс «j» - вызвавшую его причину.
Обозначим работу нагрузки первого состояния (сила F1) на перемещениях первого состояния через А11, а работу силы F2 на вызванных ею перемещениях - А22:
Используя (1.9), работы А11 и А22 можно выразить через внутренние силовые факторы:

Рассмотрим случай статического нагружения той же системы (рис.5,а) в такой последовательности. Сначала к системе прикладывается статически возрастающая сила F1 (рис.23,б); когда процесс ее статического нарастания закончен, деформация системы и действующие в ней внутренние усилия становятся такими же, как и первом состоянии (рис.23,а). Работа силы F1 составит:
Затем на систему начинает действовать статически нарастающая сила F2 (рис.5,б). В результате этого система получает дополнительные деформации и в ней возникают дополнительные внутренние усилия, такие же, как и во втором состоянии (рис.5,а). В процессе нарастания силы F2 от нуля до ее конечного значения сила F1 , оставаясь неизменной, перемещается вниз на величину дополнительного прогиба и, следовательно, совершает дополнительную работу:
Сила F2 при этом совершает работу:
Полная работа А при последовательном нагружении системы силами F1, F2 равна:
С другой стороны, в соответствии с (1.4) полную работу можно определить в виде:
Приравнивая друг к другу выражения (1.11) и (1.12), получим:
А12=А21 (1.14)
Равенство (1.14) носит название теоремы о взаимности работ, или теоремы Бетти: работа сил первого состояния на перемещениях по их направлениям, вызванных силами второго состояния, равна работе сил второго состояния на перемещениях по их направлениям, вызванных силами первого состояния. Опуская промежуточные выкладки, выразим работу А12 через изгибающие моменты, продольные и поперечные силы, возникающие в первом и втором состояниях:
Каждое подинтегральное выражение в правой части этого равенства можно рассматривать как произведение внутреннего усилия, возникающего в сечении стержня от сил первого состояния, на деформацию элемента dz, вызванную силами второго состояния.
Лабораторная работа № 10
Цель работы – проверить опытным путем справедливость теоремы о взаимности перемещений и на ее основе построить упругую линию балки.
Основные сведения
Теорема о взаимности работ гласит, что работа первой силы на перемещении точки ее приложения под действием второй силы равна работе второй силы на перемещении точки ее приложения под действием первой силы, т.е.
F 1 у 12 = F 2 у 21 = W.(10.1)
Если силы равны, то теорема переходит в теорему о взаимности перемещений: перемещение первого сечения под действием силы, приложенной во втором сечении, равно перемещению второго сечения под действием той же силы, но приложенной в первом сечении.
у 12 = у 21 . (10.2)
Порядок выполнения и обработка результатов
Опыты проводятся на настольной установке СМ-4, представляющей собой двухопорную балку описанную в лабораторной работе № 9 .
Проверка теоремы о взаимности перемещений (рис. 10.1) выполняется следующим образом.
Рис. 10.1. Проверка теоремы о взаимности перемещений
В двух произвольных сечениях балки устанавливаются стрелочные индикаторы и гиревые подвесы (сечения 1 и 2 рис. 10.1, а). На индикаторе сечения 2 снимается начальный отсчет, балка нагружается в сечении 1 нагрузкой F и снимается отсчет индикатора, установленного в сечении 2 (см. рис. 10.1, б). Разность данного и начального отсчетов равна величине прогиба у 21 в сечении 2. Затем балка разгружается.
Данные по F и у 21 заносятся в журнал испытаний. Далее на индикаторе, установленном в сечении 1, снимается начальный отсчет, балка нагружается в сечении 2 той же нагрузкой F и по разности отсчетов индикатора 1 определяется величина прогиба у 12 (см. рис. 10.1, в).
Балка разгружается и данные по у 12 заносятся в журнал испытаний. Сопоставлением полученных данных по равенству (10.2) проверяется теорема о взаимности перемещений. Если равенство (10.2) не соблюдается, определяют процент погрешности
![]()
и делают выводы.
Используя теорему о взаимности перемещений, можно с помощью одного индикатора, закрепленного стационарно в сечении приложения нагрузки заданной расчетной схемы (рис. 10.2), определить экспериментально перемещения балки в любом сечении и построить упругую линию балки.
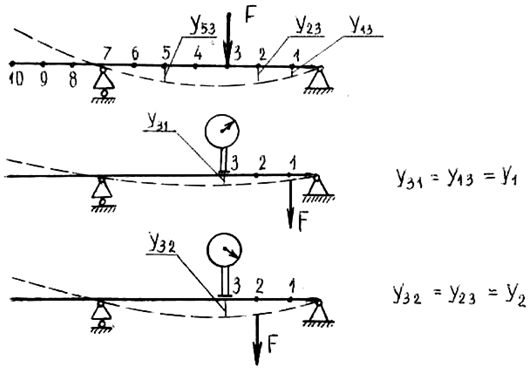
Рис. 10.2. Построение упругой линии балки
Индикатор линейных перемещений устанавливается в том сечении балки, в котором по расчетной схеме прикладывается заданная нагрузка. Один гиревой подвес размещается на консоли, второй – внутри пролета.
Определяются перемещения сечения, в котором установлен индикатор, при последовательном приложении заданной нагрузки F в расчетные точки 1 … 10 (см. рис. 10.2). Эта операция включает в себя установку гиревого подвеса в расчетную точку, снятие начального отсчета по индикатору, приложение заданной нагрузки F к гиревому подвесу, снятие отсчета индикатора и определение приращения отсчетов, равного определяемому перемещению. Для приложения нагрузки в сечениях, расположенных на консоли, используется второй гиревой подвес.
Согласно теореме о взаимности перемещений, эти перемещения будут равны перемещениям расчетных точек при приложении нагрузки F в сечении установки индикатора.
Полученные значения перемещений заносятся в журнал испытаний.
Для сравнения экспериментальных перемещений с теоретическими последние просчитываются для заданной
Теорема о взаимности работ. Теорема о взаимности перемещений
Рассмотрим линейно-деформируемую систему в двух различных состояниях, отвечающих двум различным нагрузкам (рис. 5.15).Для простоты выкладок рассмотрим простую двухопорную балку, последовательно нагружаемую двумя сосредоточенными силами.
Рис 15. Прямой и обратный порядок приложения нагрузки
Приравнивая полные работы при прямом и обратном порядке приложения нагрузок, получим
Работа, фактически совершаемая силой на перемещениях, вызываемых другой силой или силами, называется дополнительной работой.
Согласно теореме о взаимности работ, работа сил первого состояния на перемещение второго состояния равна работе сил второго состояния на перемещение первого состояния.
Аналогичным образом может быть доказана также взаимность дополнительной работы внутренних сил.
Рис 16. Взаимность дополнительной работы внутренних сил.
Используя закон сохранения энергии, можно показать, что дополнительная работа внешних сил равна по абсолютному значению дополнительной работе внутренних сил:
Принимая
получим теорему о взаимности перемещений.
Перемещение точки приложения единичной силы по ее направлению, вызванное второй единичной силой, равно перемещению точки, приложения второй единичной силы по направлению последней, вызванному действием первой единичной силы.
Определение перемещений методом Мора
Вместо системы сил F 1 и F 2 ,введем грузовое и вспомогательное состояния:
Рис 17. Введение грузового и вспомогательного состояний
Запишем теорему о взаимности работ для этих двух состояний:
После суммирования по отдельным участкам балки получим интеграл Мора
Пример 5.2. Рассмотрим пример на использование интеграла Мора на определение перемещений для консольной балки, нагруженной сосредоточенной силой
Рис 18. Построение грузовой и вспомогательной эпюры для консольной балки
Используем интеграл Мора.
На практике использование такого подхода затруднено. Эта трудность преодолевается организацией интегрирования, интегрирование легко реализуется на компьютере.
Графоаналитический способ определения перемещения при изгибе. Способ Верещагина
Введем два упрощающих обстоятельства:
Линейная функция в пределе рассматриваемого участка.
Рис 19 Графоаналитическое вычисление интеграла Мора
Последний интеграл представляет собой статический момент фигуры ABCD относительно оси y. Произведение
представляет собой ординату, взятую на вспомогательной эпюре под центром тяжести грузовой.
гдеn - номер участка.
Пример 5.3. Еще раз рассмотрим консольную балку
Рис 20. Использование способа Верещагина для консольной балки
Более сложные случаи:
1. Умножение трапеции на трапецию
Рис. 21. Умножение трапеции на трапецию
Для умножения трапеции на трапецию можно перейти к умножению прямоугольника на трапецию и треугольника на трапецию.
Определение умножения прямоугольника на трапецию означает, что А f берем по прямоугольнику, а M к с по трапеции.
Правило перестановок действует только на линейных эпюрах.
2. Параболический сегмент
Рис 22. Площадь и положение центра тяжести для параболического сегмента
3. Вогнутый параболический треугольник
Рис 23. Площадь и положение центра тяжести для вогнутого параболического треугольника
4. Выпуклый треугольник
Рис 24. Площадь и положение центра тяжести для выпуклого параболического треугольника
5. Выпуклая параболическая трапеция.
Рис 25. Разбиение площадей и положение центров тяжести для выпуклой параболической трапеции
Пример: 5.4. Рассмотрим более сложный случай нагружения консольной балки, кода действуют все три вида внешних нагрузок. Необходимо определить максимальный угол поворота балки
Рис. Консольная балка при одновременном действии трех нагрузок
I способ. Заменим эпюру М f совокупностью более простых фигур.
то есть вершина параболы находится за пределами балки.
Для построения вспомогательной эпюры необходимо:
1. Рассмотрим некоторую балку без внешних нагрузок.
2. В заданной точке прикладываем F=1 или М=1 соответственно для определения прогиба или угла поворота. Направление действия внешних нагрузок - произвольно.
3. Считая единичную нагрузку внешней, определяем реакции и строим эпюры.
Формула для определения угла поворота способом Верещагина примет следующий вид
где - ордината, взятая на вспомогательной эпюре М к под центром тяжести грузовой эпюры - с учетом разбития грузовой на элементарные фигуры
При построении изогнутой оси балки мы используем:
1. Знак обобщенного перемещения. Для рассмотренного случая точка поворачивается по часовой стрелке.
2. Используем знак изгибающего момента на грузовой эпюре.
Примерный вид изогнутой оси балки показан на рис. 5.24.
II способ. Использование принципа суперпозиций.
Рис Использования принципа суперпозиции











 Внедрение и использование УМК «Изучаем русский язык» в двуязычной образовательной среде
Внедрение и использование УМК «Изучаем русский язык» в двуязычной образовательной среде Система образования в индии как фундамент знаний и жизни
Система образования в индии как фундамент знаний и жизни Роман Вишневский – трейдер и владелец брокерской компании
Роман Вишневский – трейдер и владелец брокерской компании Николай Кольцов – биолог из будущего
Николай Кольцов – биолог из будущего